This R&D study, carried out in collaboration with ESA, focused on high-fidelity modeling of a robotic arm manipulation scenario, as part of an in-orbit service mission.
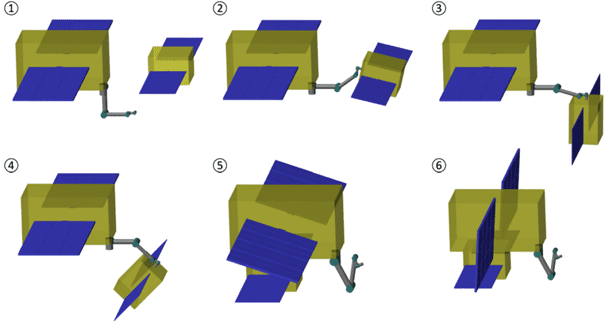
The image below shows the mission sequence:
- 1: servicer and client satellite are separated,
- 2, 3, 4: the client satellite is docked and handled with a robotic arm,
- 5, 6: the client satellite is attached to the servicer, and the solar panels can rotate.
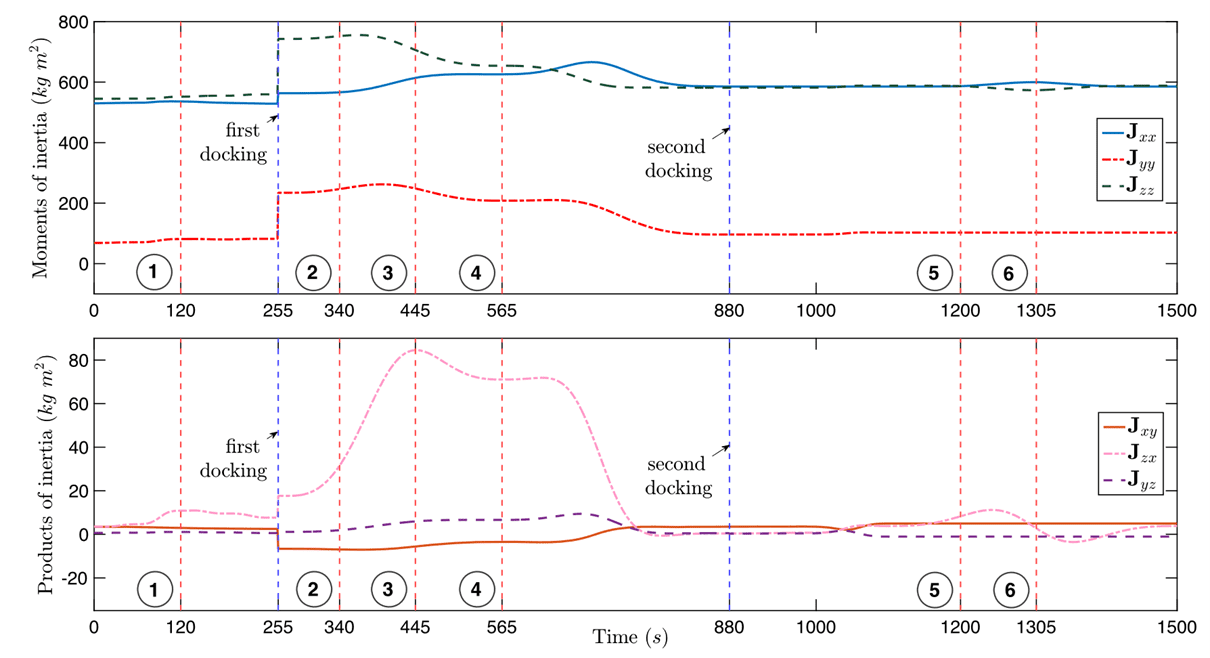
SDTlib was used to model the service satellite and the client, each with their own properties of mass, inertia, flexible modes, etc., and then the complete system after docking. For example, the following figure shows the evolution of moments of inertia during the mission. They vary considerably after docking and during manipulation by the robotic arm (phases 2, 3, 4). Therefore, it is important to take these variations into account when tuning the controller, as it was done with the SDTlib.
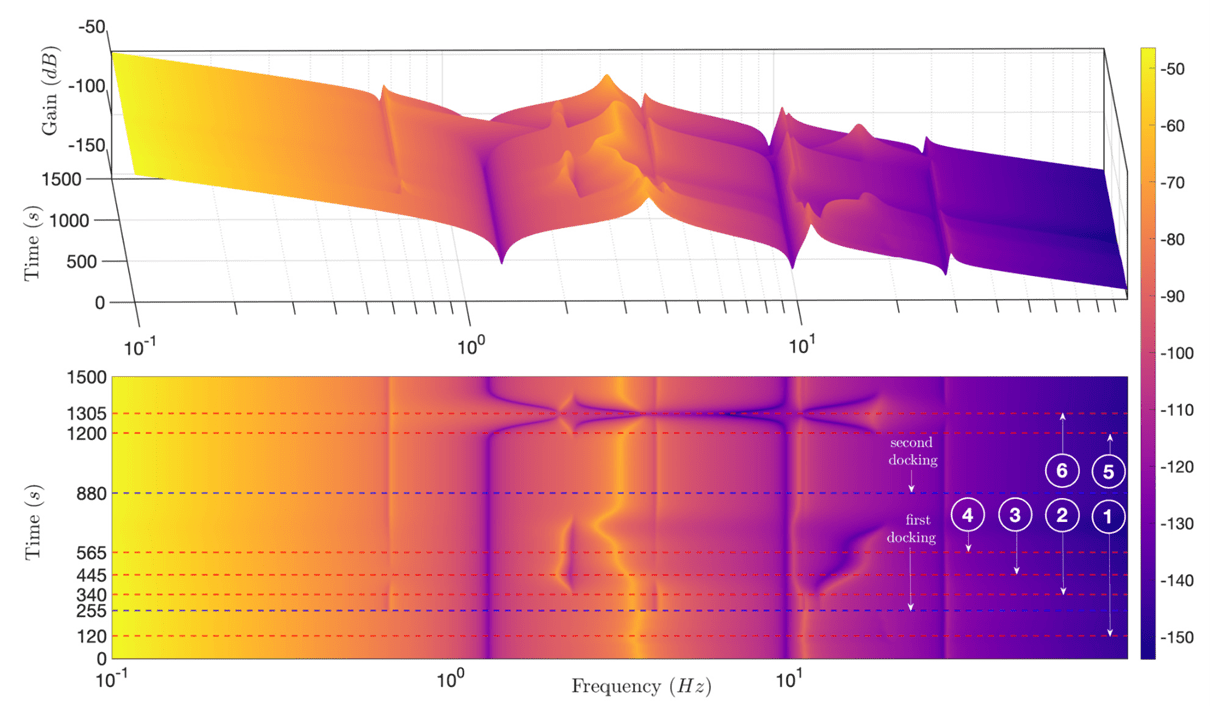
Frequency behavior can also be analyzed as a function of time, as shown in the following figure. Some natural frequencies strongly vary after docking and during manipulation by the robotic arm (around 3Hz and between 10 and 20Hz), as well as during rotation of the solar panels.
It is important to note that this model, obtained with SDTlib, is parameterized with the uncertainties but also the positions of the arm links. It is therefore a continuous representation of all possible geometric configurations, which could be used to automatically optimize, with Matlab’s robust control toolbox , a controller that takes into account changes in inertia and flexible modes during proximity operations.
Rodrigues, R., Preda, V., Sanfedino, F., & Alazard, D. (2022). Modeling, robust control synthesis and worst-case analysis for an on-orbit servicing mission with large flexible spacecraft. Aerospace Science and Technology, 107865.