Expertise in modeling and control of space systems
The founders of DYCSYT are recognized by the international GNC community for their expertise in the modeling and control of space systems. In particular, they have a long experience in collaborative projects with ESA and industrial partners.
DYCSYT offers consulting services, such as technical support or customized R&D studies. We can also be involved in consortiums, starting from the proposal writing stage: ESA ITT (invitation to tender), GSTP (general support technology programme), OSIP (open space innovation platform), R&T CNES, Horizon Europe program…
Modeling and simulation
The development of the SDTlib has been driven by our research on the modeling of multi-body flexible structures. The SDTlib produces a high-fidelity model of system dynamics for frequency analysis, control tuning and time-domain simulation. Parametric uncertainties are taken into account to accelerate the GNC design and facilitate validation using robust control tools. The SDTlib models are also well suited for time-efficient simulation, in particular with regard to flexible dynamics.
Robust control
Modern robust control tools make it possible to evaluate performance right from the start of a project and to automatically optimize the controller and the performance using the model proided by the SDTlib. They are also able handle model uncertainties directly in the controller synthesis to speed up the design and validation of the GNC/AOCS system. They can even unlock technical locks where traditional methods fail, in particular in presence of complex flexible dynamics or stringent performance requirements.
On-orbit servicing
Our modeling and robust control methods are particularly useful for in-orbit service missions: modeling docking mechanisms, taking into account translation/rotation couplings, inertia variations during robotic handling of a target satellite, in-orbit assembly….
Precision pointing
Our work has been largely motivated by the development of high-precision pointing missions: modeling and active control of microvibrations, disturbance rejection, flexible dynamics, pointing performance assessment, controller optimization, comparison of control architectures…
Verification and Validation (V&V) of space systems
According to NASA, in a typical satellite project, 80% of GNC time is dedicated to V&V (as opposed to design itself), due to the increasing complexity of space systems.
As a result, NASA and ESA have set up numerous initiatives within the international GNC community – R&D project funding, GNC V&V seminars, education and training, creation and dissemination of benchmark problems – to improve the autonomy of guidance, navigation and control systems, while limiting the complexity of the system and the various phases of the life cycle.
Our research activities, and in particular SDTlib, are a response to this need. Once these tools were sufficiently mature, DYCSYT was created with the aim of contributing to their transfer to the industrial world.
For more information:
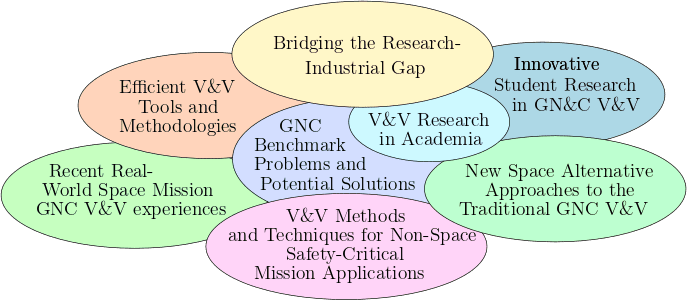
GNC V&V workshop in July 2025
DYCSYT is involved in the organization of the GNC V&V (Verification & Validation) workshop organized in ISAE-Supaero in July 2025, in collaboration with ESA, NASA, ONERA, CNES, DLR and ASI. In particular, the SDTlib will be used in a practical training using Matlab-Simulink for the modeling, control and analysis
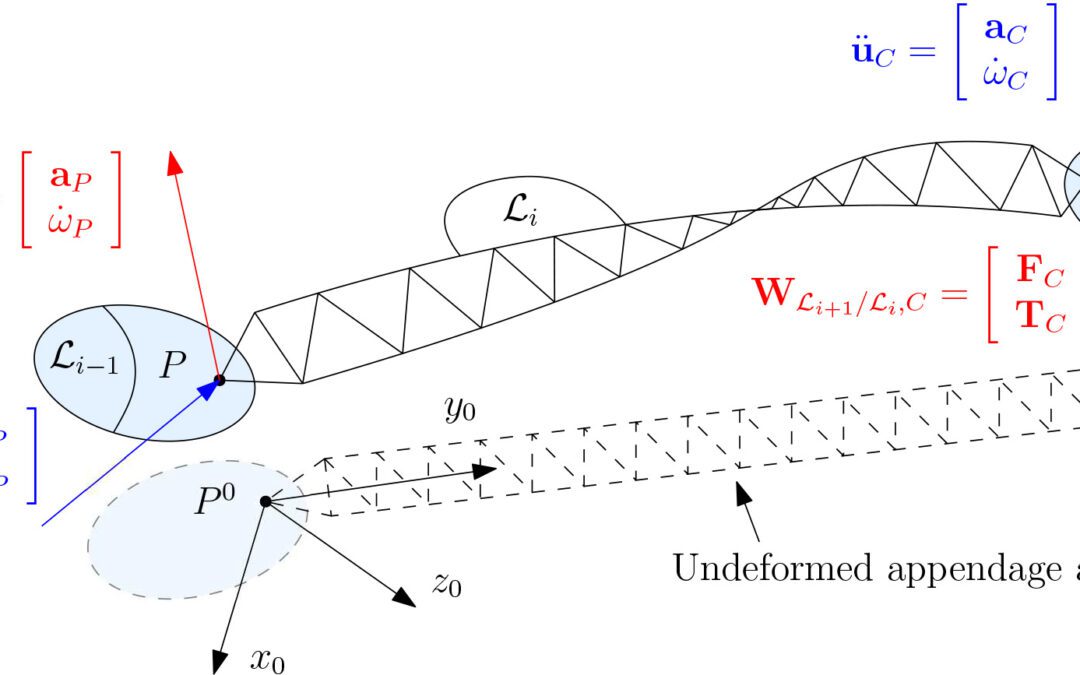
The TITOP approach to multi-body modeling of flexible structures
The TITOP (Two-Input Two-Output Port) formalism enables flexible structures to be modeled within a multi-body formalism, in order to build models of complex structures. It is compatible with the representation of parametric uncertainties.
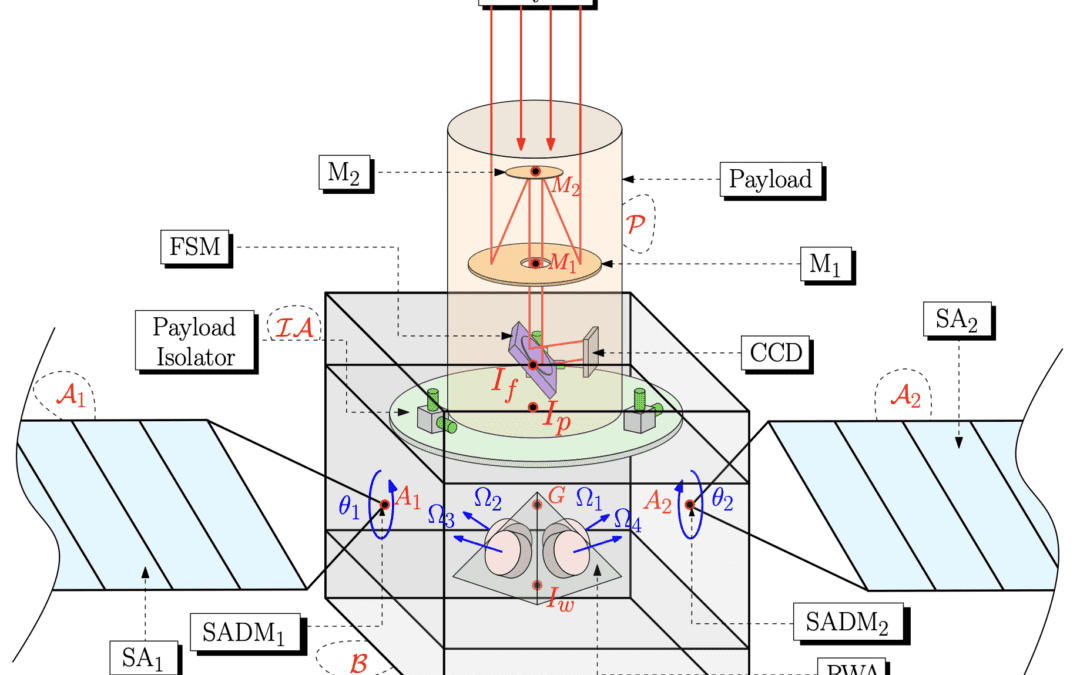
Precision pointing for an observation mission
This R&D study, under ESA contract in collaboration with Thalès Alenia Space, focused on optimizing the pointing performance of an observation mission. The system was modeled using SDTlib to perform a frequency analysis of the system and optimize the controllers.
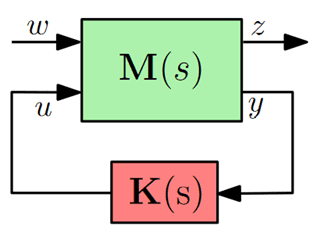
Robust control (H infinity and H2)
In modern theory control, the performances of a system can be measured with the $\mathcal H_\infty$ and $\mathcal H_2$ norms. A multi-objectives optimization problem is then formulated to tune the controller while ensuring robustness to uncertainties.
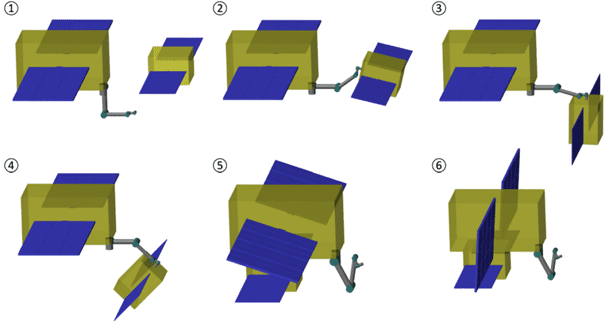
Robotic arm manipulation for on-orbit servicing
This R&D study, carried out in collaboration with ESA, focused on the high-fidelity modeling of a robotic arm manipulation scenario, as part of an in-orbit servicing mission. The system was modeled and analyzed using SDTlib.
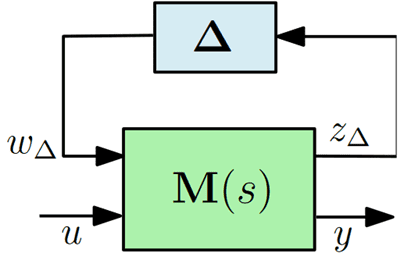
LFT modeling of uncertain systems
This article presents how the LFT (Linear Fractional Transformation) representation can be used to represent uncertainties on system parameters in a continuous way (without sampling the parametric space).
R&D study, consortium collaboration, technical support, customized training, SDTlib license: contact us to discuss your project, and together we’ll choose the solution best suited to your needs.