This R&D study, under ESA contract in collaboration with Thalès Alenia Space, focused on optimizing the pointing performance of a generic observation mission. The system was fully modeled using SDTlib to perform a frequency analysis of the system and optimize the controllers.
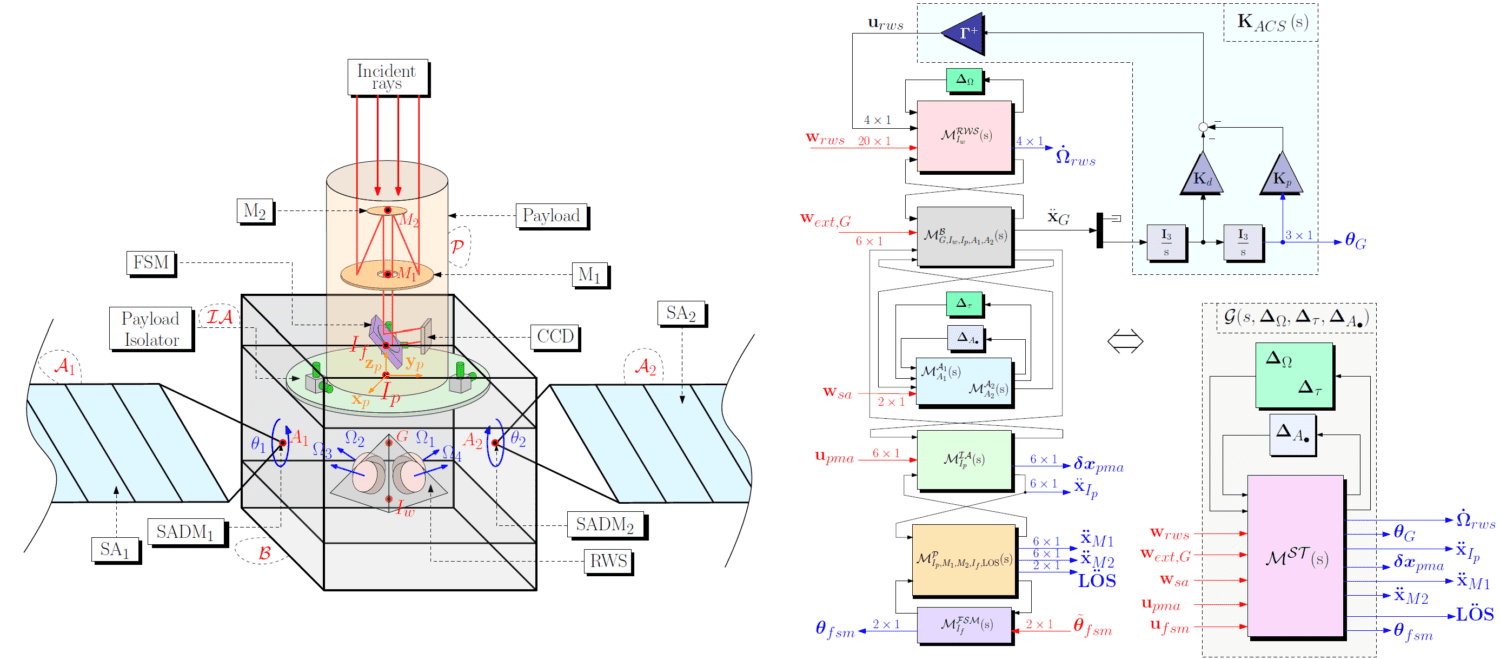
Numerous possible disturbances were considered:
- Flexible elements (solar panels, central body, and optical payload),
- Solar panel mechanisms (SADM) source of microvibrations due to imperfections in the gearbox,
- Reaction wheels may exhibit unbalance, creating speed-dependent harmonic disturbances.
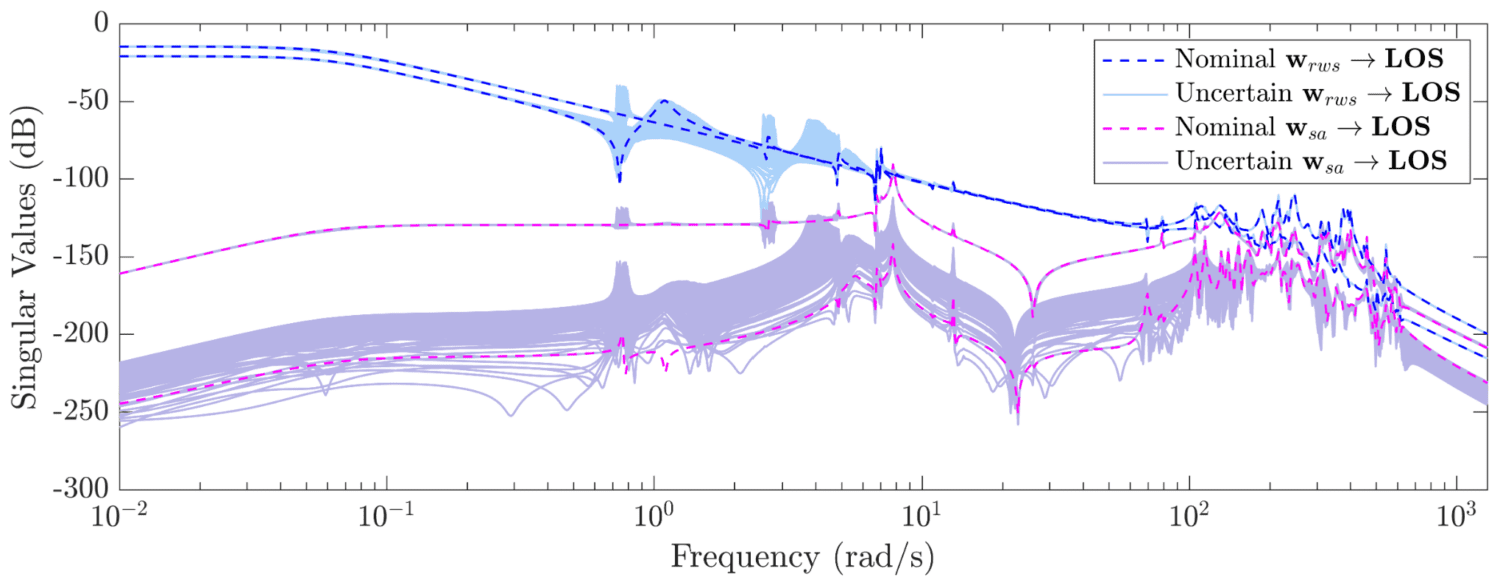
The model obtained with SDTlib has enabled a detailed analysis of the frequency behavior, and in particular the propagation of microvibrations in the system. The following figure shows the transfer function between disturbances (microvibrations) and pointing error at the line of sight. Up to 100 rad/s, the impact of reaction wheel disturbance is much greater than that of SADM (and, above 100 rad/s, they are comparable). In particular, we see the impact of flexible modes between 1 and 10 rad/s, which undergo a frequency and amplitude shift due to solar panel rotation and possible reaction wheel speeds; when the frequency of the reaction wheel harmonic disturbance coincides with a structural mode, pointing performance is degraded. However, the synthesis of a robust controller will mitigate this effect.
To counter these disturbances, a three-stage architecture was studied:
- Attitude control (jet wheels, RWA),
- Passive and active payload insulation(proof-mass actuators, PMA),
- Fast-steering mirrors (FSM),
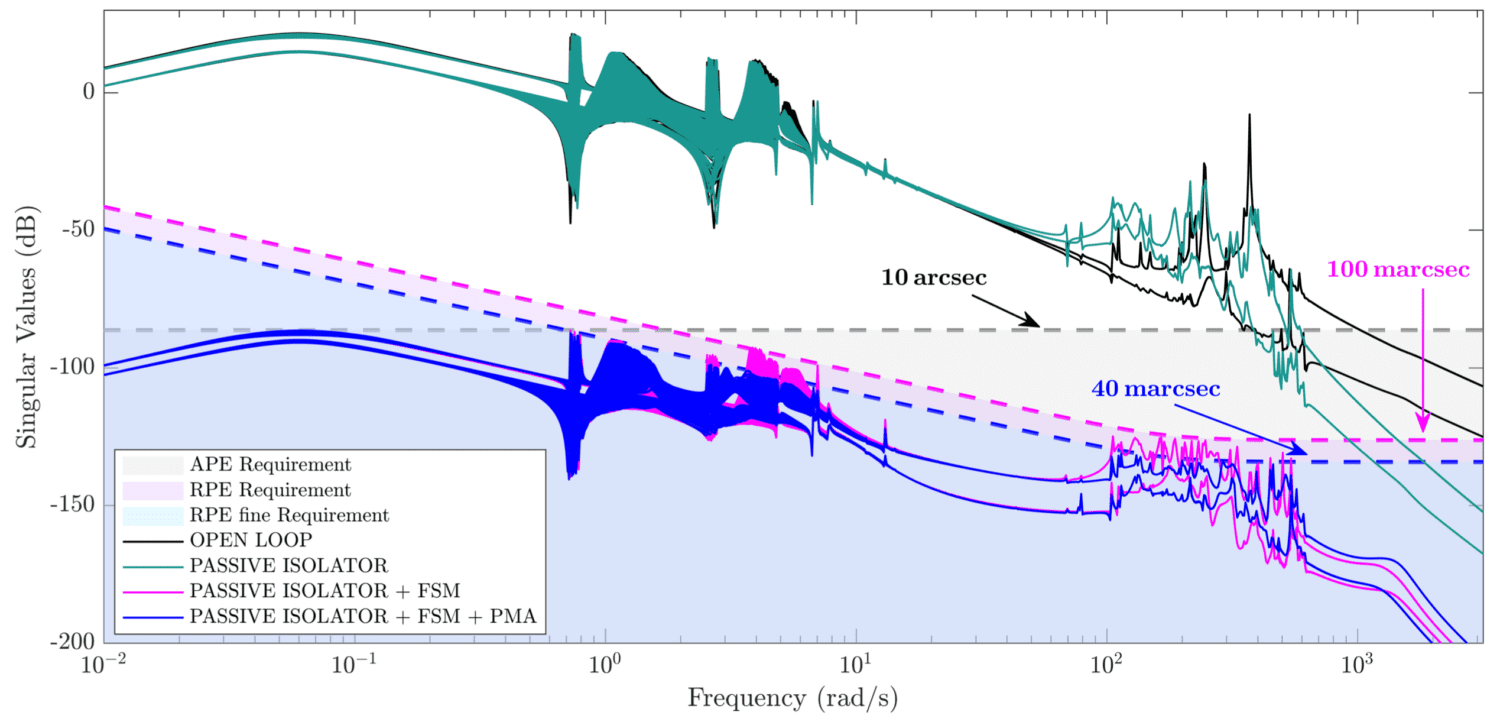
The following figure shows the transfer function between disturbances (microvibrations) and pointing error, progressively adding the various control stages: open loop, passive isolation, fine pointing (FSM), and active isolation (PMA). Passive isolation reduces high-frequency error (above 200 rad/s), while introducing additional modes around 100 rad/s (green curve vs. black curve). The introduction of active control with FSMs and PMAs further improves accuracy, reducing high-frequency error down to 100 milli-arcseconds and then 40 milli-arcseconds. These performances are achieved in a way that is robust to uncertainties.
In conclusion, the model obtained with SDTlib, and the robust control techniques used, have made it possible to :
- Analyze the propagation and impact of various sources of disturbance on the line of sight,
- Quickly compare different control architectures,
- Optimize controller and performance according to actuator and sensor specifications.
Sanfedino F., Alazard D, Guercio N., Deslaef N., Double-stage active control of micro-vibrations for high accuracy pointing missions. 2023, ESA 12th International Conference on Guidance Navigation and Control and 9th International Conference on Astrodynamics Tools and Techniques, 2023-06-16 – 2023-06-12 (2023-06-12, Sopot).