All our articles
GNC V&V workshop in July 2025
DYCSYT is involved in the organization of the GNC V&V (Verification & Validation) workshop organized in ISAE-Supaero in July 2025, in collaboration with ESA, NASA, ONERA, CNES, DLR and ASI. In particular, the SDTlib will be used in a practical training using Matlab-Simulink for the modeling, control and analysis of a flexible spacecraft
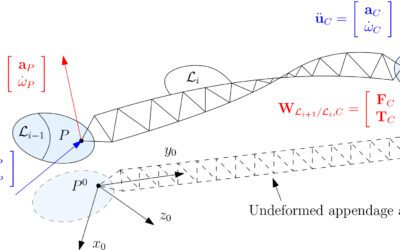
The TITOP approach to multi-body modeling of flexible structures
The TITOP (Two-Input Two-Output Port) formalism enables flexible structures to be modeled within a multi-body formalism, in order to build models of complex structures. It is compatible with the representation of parametric uncertainties.
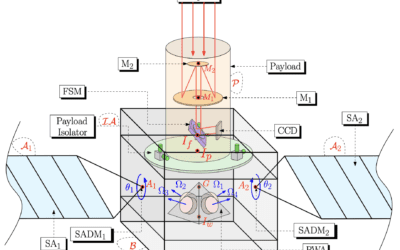
Precision pointing for an observation mission
This R&D study, under ESA contract in collaboration with Thalès Alenia Space, focused on optimizing the pointing performance of an observation mission. The system was modeled using SDTlib to perform a frequency analysis of the system and optimize the controllers.
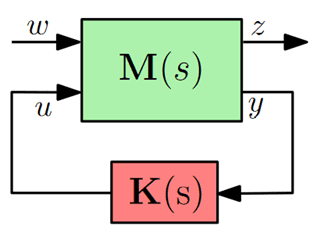
Robust control (H infinity and H2)
In modern theory control, the performances of a system can be measured with the $\mathcal H_\infty$ and $\mathcal H_2$ norms. A multi-objectives optimization problem is then formulated to tune the controller while ensuring robustness to uncertainties.
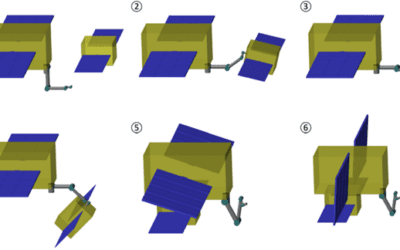
Robotic arm manipulation for on-orbit servicing
This R&D study, carried out in collaboration with ESA, focused on the high-fidelity modeling of a robotic arm manipulation scenario, as part of an in-orbit servicing mission. The system was modeled and analyzed using SDTlib.
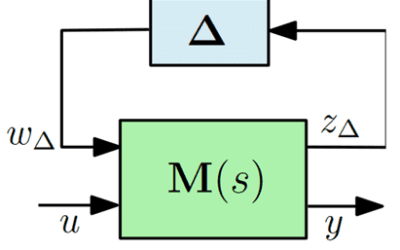
LFT modeling of uncertain systems
This article presents how the LFT (Linear Fractional Transformation) representation can be used to represent uncertainties on system parameters in a continuous way (without sampling the parametric space).