Tous nos articles
GNC V&V workshop en Juillet 2025
DYCSYT participe à l’organisation du GNC V&V (Verification & Validation) workshop à l’ISAE-Supaero en Juillet 2025, en collaboration avec l’ESA, la NASA, l’ONERA, le CNES, la DLR, et l’ASI. En particulier, la SDTlib sera utilisée dans une formation pratique sous Matlab-Simulink pour la modélisation, contrôle et analyse d’un système spatial flexible.
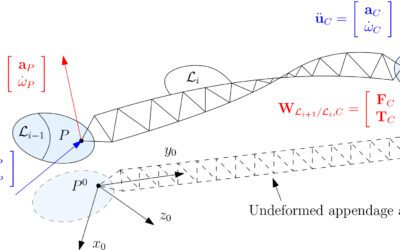
L’approche TITOP pour la modélisation multicorps des structures flexibles
Le formalisme TITOP (Two-Input Two-Output Port) permet de modéliser des structures flexibles au sein d’un formalisme multicorps, afin de construire des modèles de structures complexes. Il est compatible avec la représentation des incertitudes paramétriques.
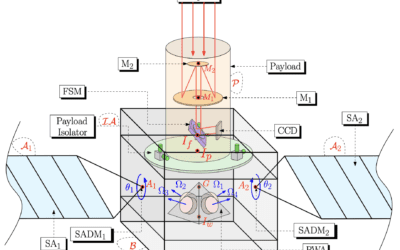
Pointage de précision pour une mission d’observation
Cette étude de R&D, sous contrat ESA en collaboration avec Thalès Alenia Space, portait sur l’optimisation de la performance de pointage d’une mission d’observation. Le système a été modélisé avec la SDTlib pour effectuer une analyse fréquentielle du système et optimiser les contrôleurs.
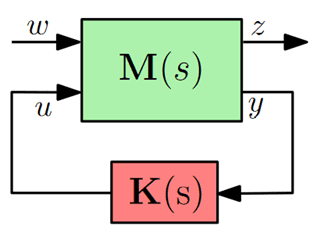
Contrôle robuste (H infini et H2)
Dans la théorie moderne du contrôle, les performances de contrôle d’un système peuvent être mesurées avec les normes $\mathcal H_\infty$ et $\mathcal H_2$. Un problème d’optimisation multi-objectifs est ensuite formulé pour régler le contrôleur de façon robuste aux incertitudes.
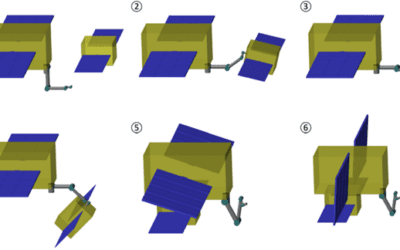
Manipulation robotique pour du service en orbite
Cette étude de R&D en collaboration avec l’ESA portait sur la modélisation haute-fidélité d’un scénario de manipulation via un bras robotique, dans le cadre d’une mission de service en orbite. Le système a été modélisé et analysé avc la SDTlib.
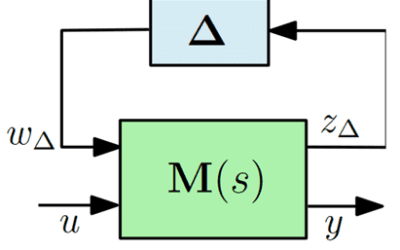
Modélisation LFT des systèmes incertains
Cet article présente comment la représentation LFT (Linear Fractional Transformation) permet de représenter des incertitudes sur les paramètres d’un système de façon continue (sans échantillonnage de l’espace paramétrique).