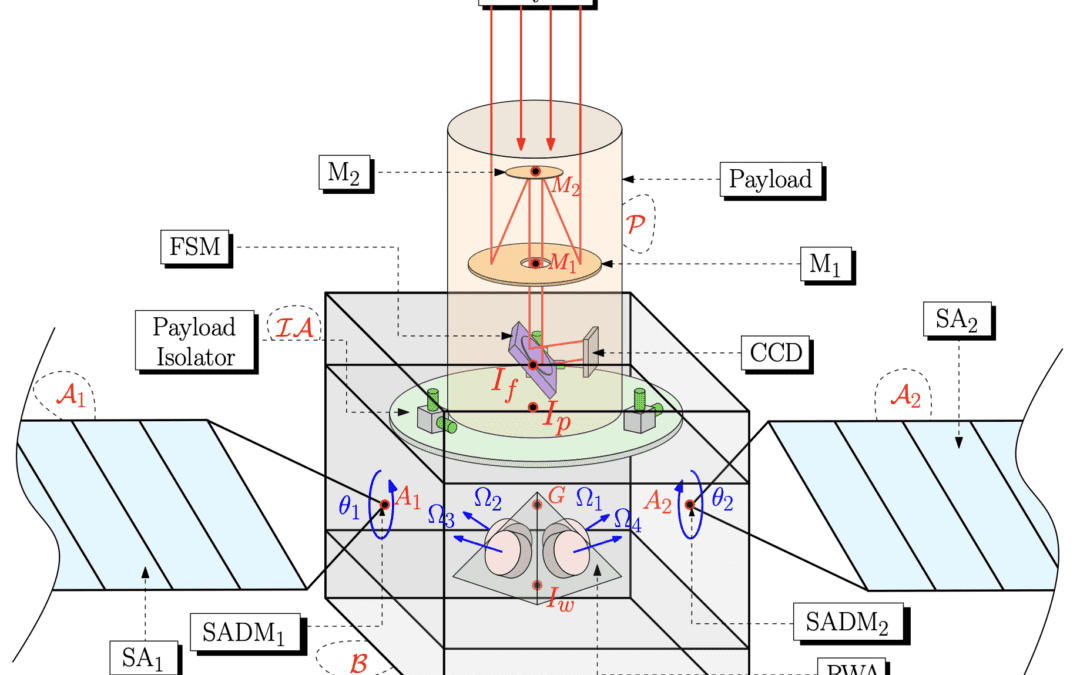
This R&D study, under ESA contract in collaboration with Thalès Alenia Space, focused on optimizing the pointing performance of a generic observation mission. The system was fully modeled using SDTlib to perform a frequency analysis of the system and optimize the...
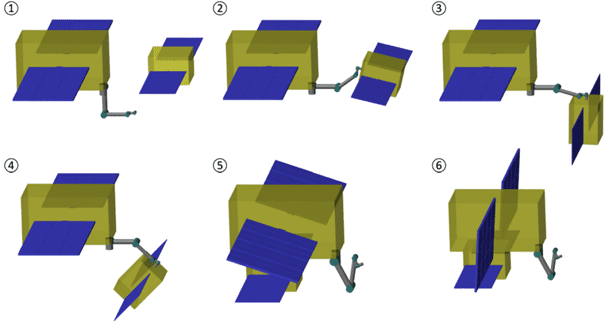
This R&D study, carried out in collaboration with ESA, focused on high-fidelity modeling of a robotic arm manipulation scenario, as part of an in-orbit service mission. The image below shows the mission sequence: 1: servicer and client satellite are separated, 2,...