SDTlib: Software for modeling, controlling and simulating flexible space systems
The SDTlib (Satellites Dynamics Toolbox – Library) is a Matlab/Simulink library for modeling satellite dynamic behavior. More than just a simulator, SDTlib has been designed to optimize frequency analysis and robust controller synthesis.
Resulting from 15 years of research at ISAE-SUPAERO in collaboration with ESA, CNES, ONERA and industrial partners, the SDTlib has been validated and used in numerous European R&D projects.
For observation, on-orbit servicing, telecommunications missions, or any other system likely to involve structural flexibilities or uncertain parameters, SDTlib provides an expert and immediately operational design support solution, without the need for costly and time-consuming in-house development.
Model each subsystem using the Simulink interface


Assemble to build the complete satellite model

The model is ready for analysis, simulation, controller synthesis…


A multi-body approach to complex systems
The SDTlib is based on a multi-body approach: simply assemble the satellite components in the Simulink interface to obtain the dynamic model of the complex system, taking into account all couplings and degrees of freedom. This enables each substructure to be finely modeled, while retaining physical parameterization including the impact of parametric uncertainties. In particular, for flexible structures such as solar panels or robotic arms, the software includes analytical and finite element models for simple geometric shapes (plates and beams), and an interface with Nastran/Patran for more complex geometries. This approach also enables us to model complex mechanisms, such as solar array driving mechanisms (SADM), and the microvibrations they can generate through imperfections in the reduction gearbox; reaction wheels are another example, with gyroscopic effects taken into account, as well as possible unbalances generating harmonic disturbances.
A fully parameterized dynamic model
The SDTlib lets you define all uncertain parameters (resonance frequencies, inertia, etc.) or variable parameters (such as solar panel orientation). It provides a single model containing all parametric configurations, from a single finite element model for each flexible substructure, and without the need to sample the parametric space. Once compiled, the model is ready to be used with Matlab’s robust control tools to automatically design a stable, robust controller, speeding up the design and validation process.
Application examples
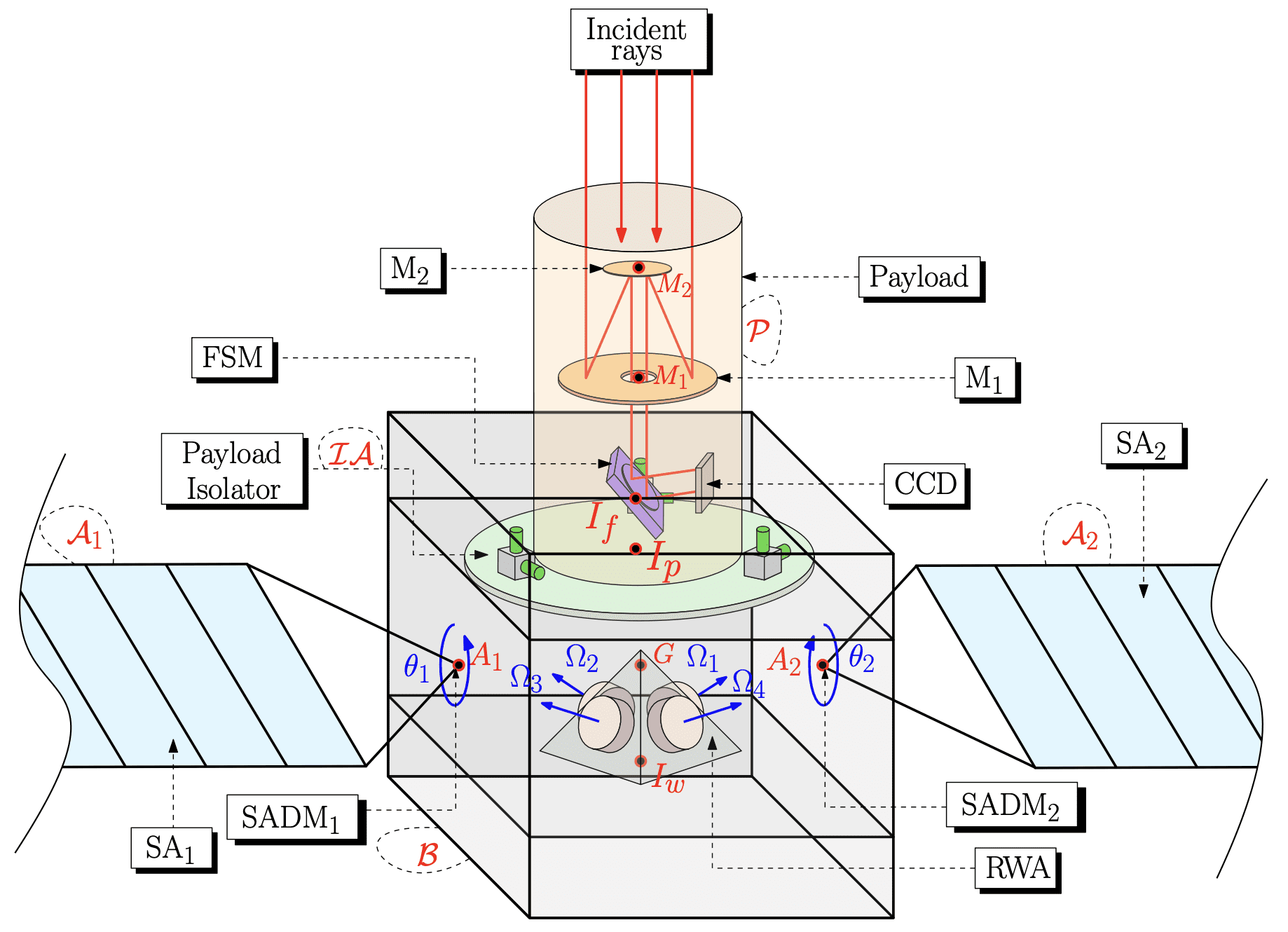
Precision pointing for an observation mission
This R&D study focused on optimizing the pointing performance of a generic observation mission. The satellite under consideration featured numerous flexible elements and vibration-generating mechanisms. The system was fully modeled using SDTlib to analyze the propagation and impact of the various sources of disturbance on the line of sight, and to quickly compare several control architectures.
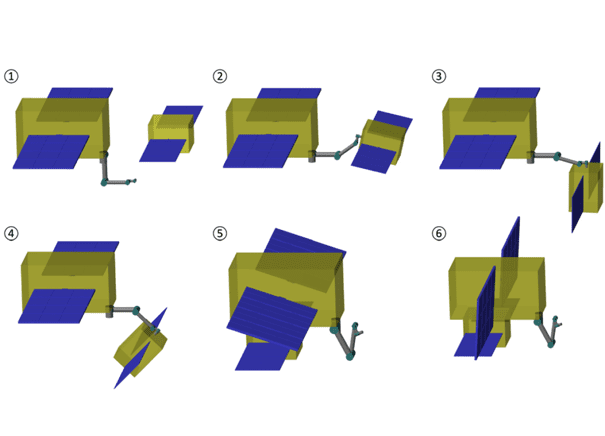
Robotic arm manipulation for on-orbit servicing
This R&D study involved high-fidelity modeling of an in-orbit service scenario. SDTlib was used to model the service satellite and the customer, each with their own properties of mass, inertia, flexible modes, etc., then the complete system after docking. This model, parameterized with uncertainties and arm link positions, was used to optimize a controller that takes into account changes in inertia and flexible modes during proximity operations.
For further information, please do not hesitate to contact us.