DYCSYT participe à l’organisation du GNC V&V (Verification & Validation) workshop à l’ISAE-Supaero en Juillet 2025. En particulier, la SDTlib sera utilisée dans une formation pratique sous Matlab-Simulink pour la modélisation, contrôle et analyse...
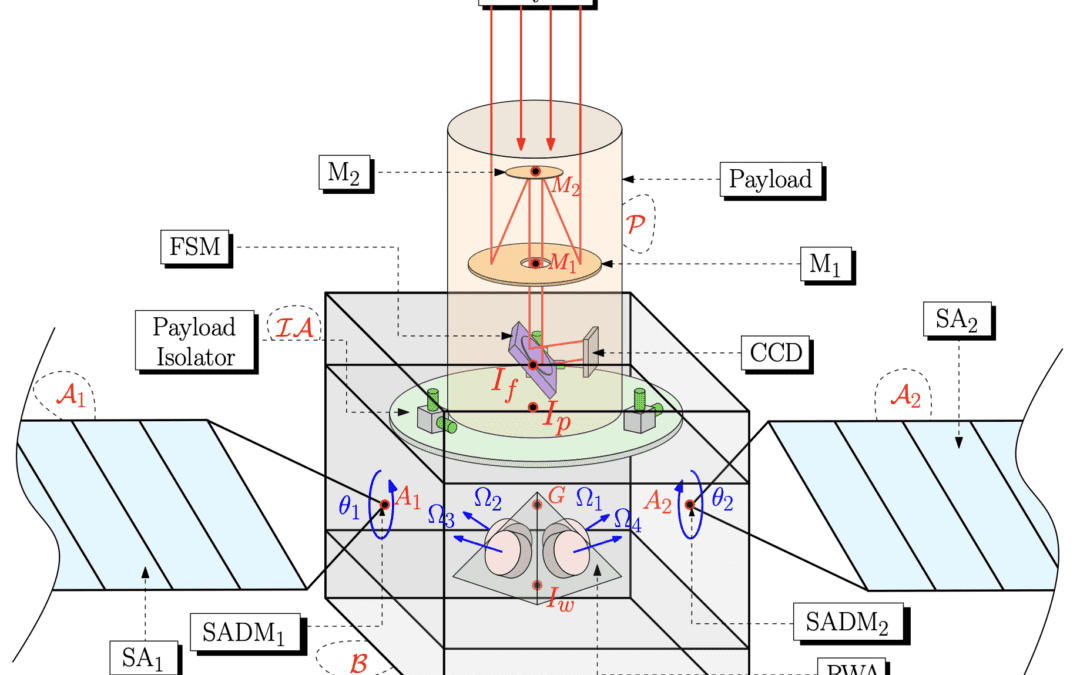
Cette étude de R&D, sous contrat ESA en collaboration avec Thalès Alenia Space, portait sur l’optimisation de la performance de pointage d’une mission générique d’observation. Le système a été entièrement modélisé avec la SDTlib pour effectuer une analyse...
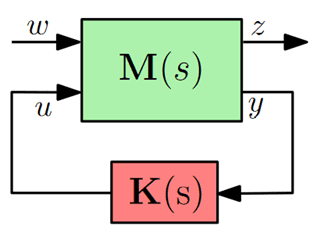
Norme $\mathcal H_\infty$, norme $\mathcal H_2$ Dans la théorie moderne du contrôle, les performances de contrôle d’un système peuvent être mesurées avec les normes $\mathcal H_\infty$ (H infini) et $\mathcal H_2$ (H2). En notant l’opérateur de trace...
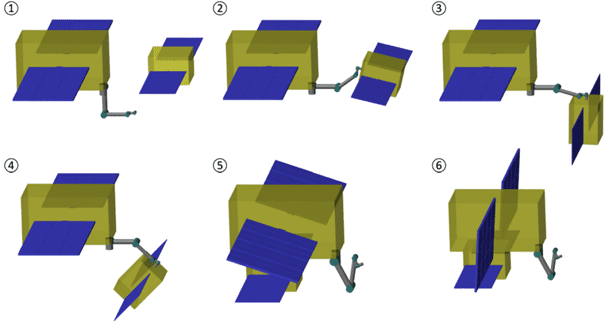
Cette étude de R&D en collaboration avec l’ESA portait sur la modélisation haute-fidélité d’un scénario de manipulation via un bras robotique, dans le cadre d’une mission de service en orbite. L’image ci-dessous représente le déroulement de la mission: 1: le...
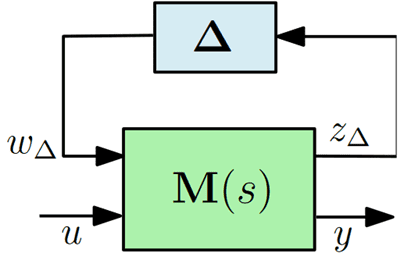
Contexte Le terme « incertitude » fait référence aux écarts, nécessaires, entre le modèle mathématique d’un système physique et la réalité. De telles incertitudes peuvent dégrader la stabilité ou les performances du système, et motiver des considérations de...