DYCSYT is involved in the organization of the GNC V&V (Verification & Validation) workshop in ISAE-Supaero in July 2025. In particular, the SDTlib will be used in a practical training using Matlab-Simulink for the modeling, control and analysis of a flexible...
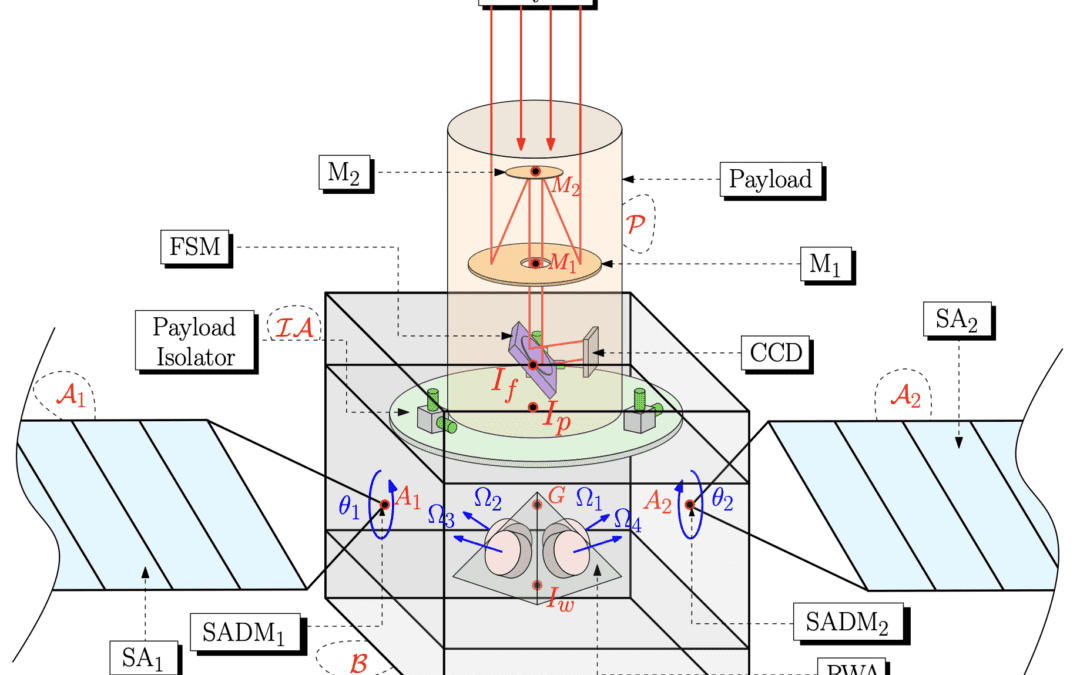
This R&D study, under ESA contract in collaboration with Thalès Alenia Space, focused on optimizing the pointing performance of a generic observation mission. The system was fully modeled using SDTlib to perform a frequency analysis of the system and optimize the...
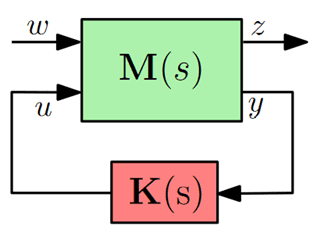
$\mathcal H_\infty$ and $\mathcal H_2$ norms In modern theory control, the performances of a system can be measured with the $\mathcal H_\infty$ (H infinity) and $\mathcal H_2$ (H2) norms. Noting $\text{Tr}()$ the trace operator, the $\mathcal H_2$ norm of a transfer...
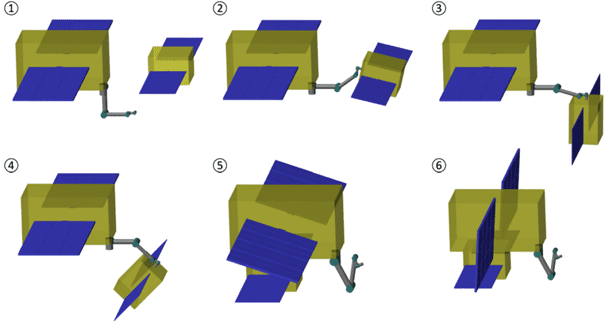
This R&D study, carried out in collaboration with ESA, focused on high-fidelity modeling of a robotic arm manipulation scenario, as part of an in-orbit service mission. The image below shows the mission sequence: 1: servicer and client satellite are separated, 2,...
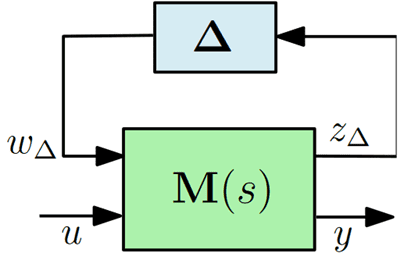
Context The term “uncertainty” refers to the necessary discrepancies between the mathematical model of a physical system, and the reality. Such uncertainties may degrade the stability or the performance of the system, and motivate for robustness considerations as of...