Download the demo version of our software
You can download the demo version of our software by clicking on the link below. This version will enable you to explore its main features and discover how it can meet your needs.
Our latest articles
GNC V&V workshop in July 2025
DYCSYT is involved in the organization of the GNC V&V (Verification & Validation) workshop organized in ISAE-Supaero in July 2025, in collaboration with ESA, NASA, ONERA, CNES, DLR and ASI. In particular, the SDTlib will be used in a practical training using Matlab-Simulink for the modeling, control and analysis
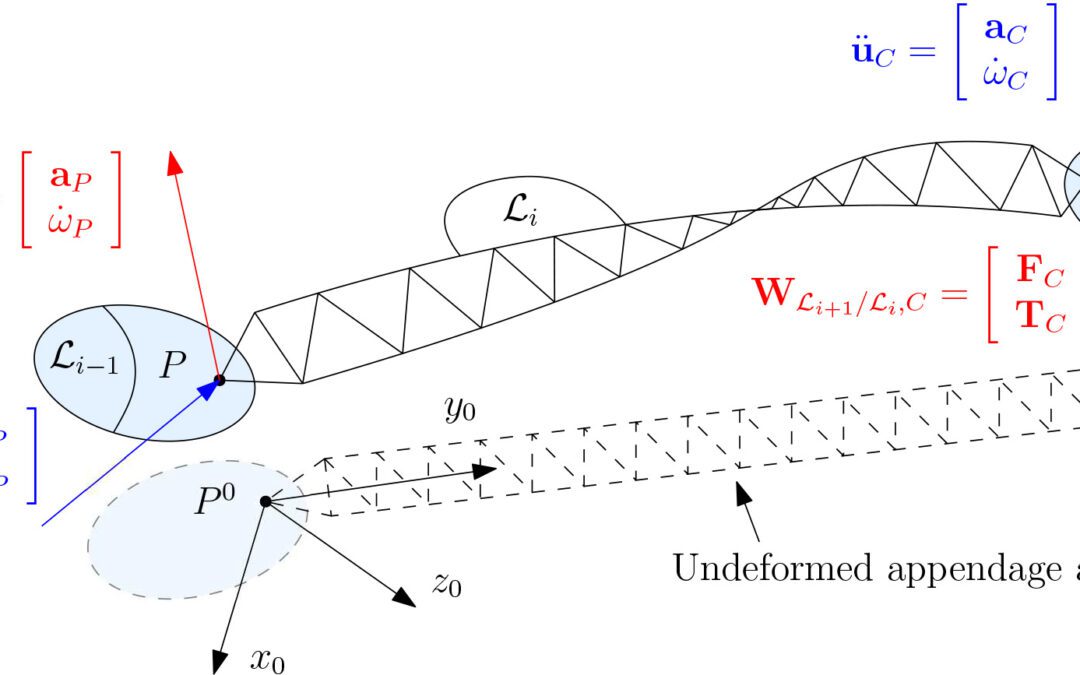
The TITOP approach to multi-body modeling of flexible structures
The TITOP (Two-Input Two-Output Port) formalism enables flexible structures to be modeled within a multi-body formalism, in order to build models of complex structures. It is compatible with the representation of parametric uncertainties.
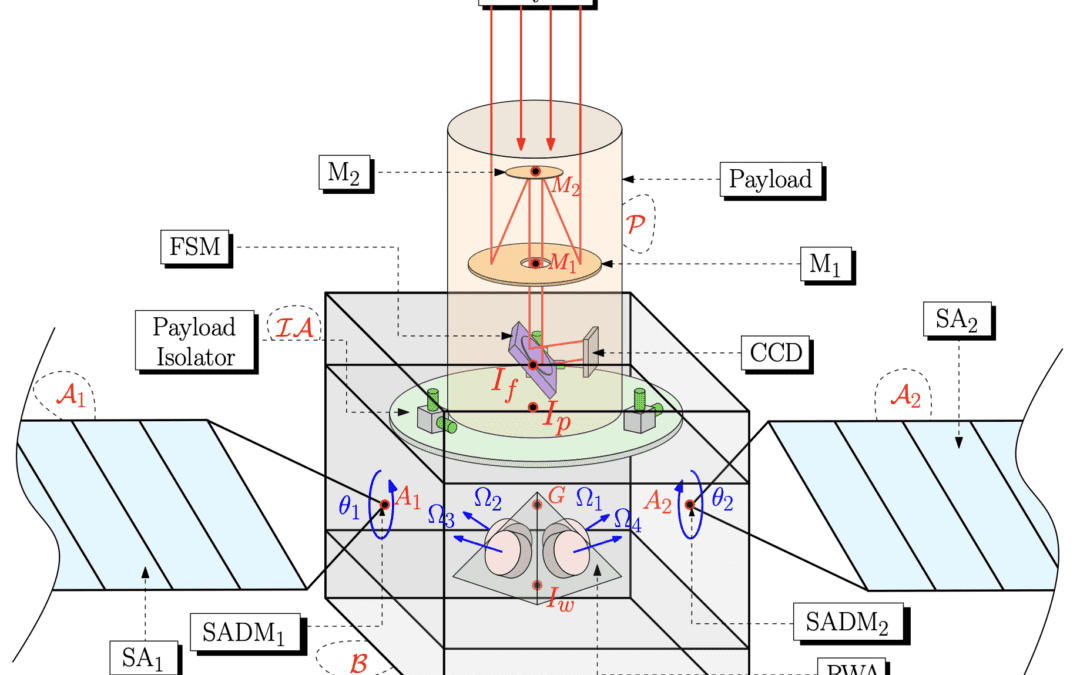
Precision pointing for an observation mission
This R&D study, under ESA contract in collaboration with Thalès Alenia Space, focused on optimizing the pointing performance of an observation mission. The system was modeled using SDTlib to perform a frequency analysis of the system and optimize the controllers.
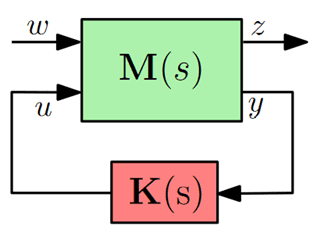
Robust control (H infinity and H2)
In modern theory control, the performances of a system can be measured with the $\mathcal H_\infty$ and $\mathcal H_2$ norms. A multi-objectives optimization problem is then formulated to tune the controller while ensuring robustness to uncertainties.
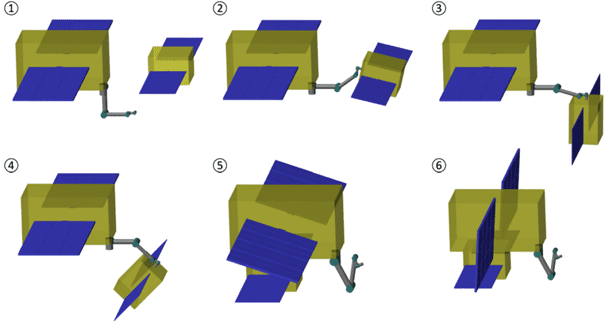
Robotic arm manipulation for on-orbit servicing
This R&D study, carried out in collaboration with ESA, focused on the high-fidelity modeling of a robotic arm manipulation scenario, as part of an in-orbit servicing mission. The system was modeled and analyzed using SDTlib.
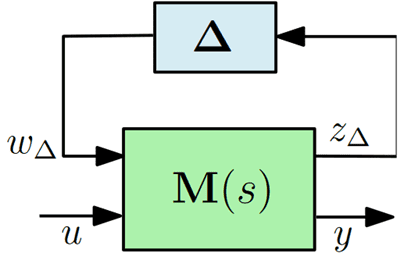
LFT modeling of uncertain systems
This article presents how the LFT (Linear Fractional Transformation) representation can be used to represent uncertainties on system parameters in a continuous way (without sampling the parametric space).
Publications
Satellite applications
Sanfedino, F., Alazard, D., Kiley, A., Watt, M., Simplicio, P., & Ankersen, F. (2023). Robust monolithic versus distributed control/structure co-optimization of flexible space systems in presence of parametric uncertainties. ESA GNC 2023.
Sanfedino, F., Thiébaud, G., Alazard, D., Guercio, N., & Deslaef, N. (2022). Advances in fine line-of-sight control for large space flexible structures. Aerospace Science and Technology, 130, 107961.
Rodrigues, R., Preda, V., Sanfedino, F., & Alazard, D. (2022). Modeling, robust control synthesis and worst-case analysis for an on-orbit servicing mission with large flexible spacecraft. Aerospace Science and Technology, 107865.
Sanfedino, F., Alazard, D., Preda, V., & Oddenino, D. (2022). Integrated modeling of microvibrations induced by Solar Array Drive Mechanism for worst-case end-to-end analysis and robust disturbance estimation. Mechanical Systems and Signal Processing, 163, 108168.
Finozzi, A., Sanfedino, F., & Alazard, D. (2022). Parametric sub-structuring models of large space truss structures for structure/control co-design. Mechanical Systems and Signal Processing, 180, 109427.
Sanfedino, F., Preda, V., Pommier-Budinger, V., Alazard, D., Boquet, F., & Bennani, S. (2020). Robust active mirror control based on hybrid sensing for spacecraft line-of-sight stabilization. IEEE Transactions on Control Systems Technology, 29(1), 220-235.
Sanfedino, F. (2019). Experimental validation of a high accuracy pointing system (Doctoral dissertation, Toulouse, ISAE).
Gonzalez, J. A. P., Pittet, C., Alazard, D., & Loquen, T. (2016). Integrated control/structure design of a large space structure using structured hinfinity control. IFAC-PapersOnLine, 49(17), pp-296.
Murali, H. H. S., Alazard, D., Massotti, L., Ankersen, F., & Toglia, C. (2015). Mechanical-attitude controller co-design of large flexible space structures. In Advances in Aerospace Guidance, Navigation and Control (pp. 659-678). Springer, Cham.
Alazard, D., Loquen, T., De Plinval, H., & Cumer, C. (2013). Avionics/Control co-design for large flexible space structures. In AIAA Guidance, Navigation, and Control (GNC) Conference (p. 4638).
The SDTlib toolbox
Sanfedino, F., Alazard, D., Kassarian, E., & Somers, F. (2023). Satellite Dynamics Toolbox Library: a tool to model multi-body space systems for robust control synthesis and analysis. arXiv preprint arXiv:2303.15872.
Courie, I., Sanfedino, F., & Alazard, D. (2021). Worst-Case Pointing Performance Analysis for Large Flexible Spacecraft. arXiv preprint arXiv:2106.01893.
Alazard, D., & Sanfedino, F. (2020, January). Satellite dynamics toolbox for preliminary design phase. In 43rd Annual AAS Guidance and Control Conference (Vol. 30, pp. 1461-1472).
Satellite Dynamics Toolbox library (SDTlib) – User’s Guide and tutoral/demo version.
Theoretical framework
Alazard, D., Finozzi, A., & Sanfedino, F. (2023). Port inversions of parametric Two-Input Two-Output Port models of flexible substructures. Multibody System Dynamics, 57(3-4), 365-387.
Finozzi, A., Sanfedino, F., & Alazard, D. (2021). Analytical Port Inversion For A Flexible Model In The Two-Input Two-Output Port Approach. In ECCOMAS Thematic Conference on Multibody Dynamics (pp. 159-170). Budapest University of Technology and Economics.
Sanfedino, F., Alazard, D., Pommier-Budinger, V., Falcoz, A., & Boquet, F. (2018). Finite element based N-Port model for preliminary design of multibody systems. Journal of Sound and Vibration, 415, 128-146.
Chebbi, J., Dubanchet, V., Perez Gonzalez, J. A., & Alazard, D. (2017). Linear dynamics of flexible multibody systems. Multibody System Dynamics, 41(1), 75-100.
Perez, J. A., Alazard, D., Loquen, T., Pittet, C., & Cumer, C. (2016). Flexible multibody system linear modeling for control using component modes synthesis and double-port approach. Journal of Dynamic Systems, Measurement, and Control, 138(12).
Perez, J. A., Alazard, D., Loquen, T., Cumer, C., & Pittet, C. (2015). Linear dynamic modeling of spacecraft with open-chain assembly of flexible bodies for ACS/structure co-design. In Advances in aerospace guidance, navigation and control (pp. 639-658). Springer, Cham.
Alazard, D., Perez, J. A., Cumer, C., & Loquen, T. (2015). Two-input two-output port model for mechanical systems. In AIAA Guidance, Navigation, and Control Conference (p. 1778).
Guy, N., Alazard, D., Cumer, C., & Charbonnel, C. (2014). Dynamic modeling and analysis of spacecraft with variable tilt of flexible appendages. Journal of Dynamic Systems, Measurement, and Control, 136(2), 021020.
Tantawi, K. H., Alazard, D., & Cumer, C. (2008). Linear dynamic modeling of spacecraft with various flexible appendages. IFAC Proceedings Volumes, 41(2), 11148-11153.
Multi-body pendulum dynamics
Kassarian, E., Sanfedino, F., Alazard, D., Montel, J., & Chevrier, C. A. (2023). Modeling of stratospheric balloons and robust line-of-sight pointing control. CEAS Space Journal, 1-18.
Kassarian, E., Sanfedino, F., Alazard, D., Montel, J., & Chevrier, C. A. (2022). Robust integrated control/structure co-design for stratospheric balloons. IFAC-PapersOnLine, 55(25), 13-18.
Kassarian, E., Sanfedino, F., Alazard, D., Chevrier, C. A., & Montel, J. (2022). Linear Fractional Transformation modeling of multibody dynamics around parameter-dependent equilibrium. IEEE Transactions on Control Systems Technology.
Kassarian, E., Sanfedino, F., Alazard, D., Evain, H., & Montel, J. (2021). Modeling and stability of balloon-borne gondolas with coupled pendulum-torsion dynamics. Aerospace Science and Technology, 112, 106607.