Cette étude de R&D en collaboration avec l’ESA portait sur la modélisation haute-fidélité d’un scénario de manipulation via un bras robotique, dans le cadre d’une mission de service en orbite.
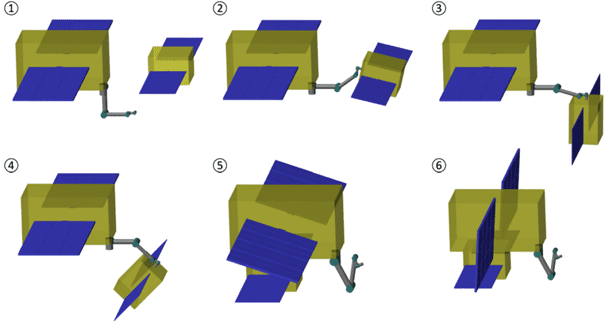
L’image ci-dessous représente le déroulement de la mission:
- 1: le servicer et le satellite client sont séparés,
- 2, 3, 4: amarrage et manipulation du satellite client avec un bras robotique,
- 5, 6: le satellite client est fixé au servicer, et les panneaux solaires peuvent tourner.
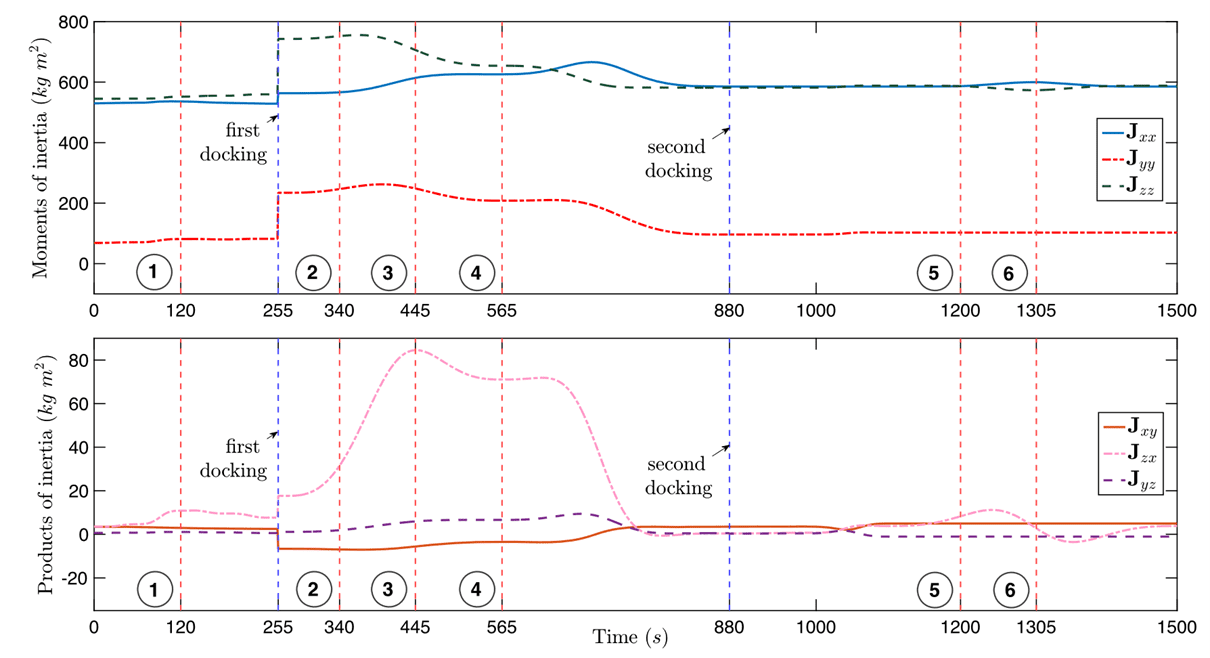
La SDTlib a permis de modéliser le satellite de service et le client, chacun avec leurs propriétés de masse, d’inertie, modes flexibles, etc., puis le système complet après amarrage. Par exemple, la figure suivante présente l’évolution des moments d’inertie au cours de la mission. Ceux-ci évoluent fortement après amarrage et lors de la manipulation par le bras robotique (phases 2, 3, 4). Ainsi, il est important de prendre en compte ces variations lors du réglage du contrôleur, ce qui a pu être fait avec la SDTlib.
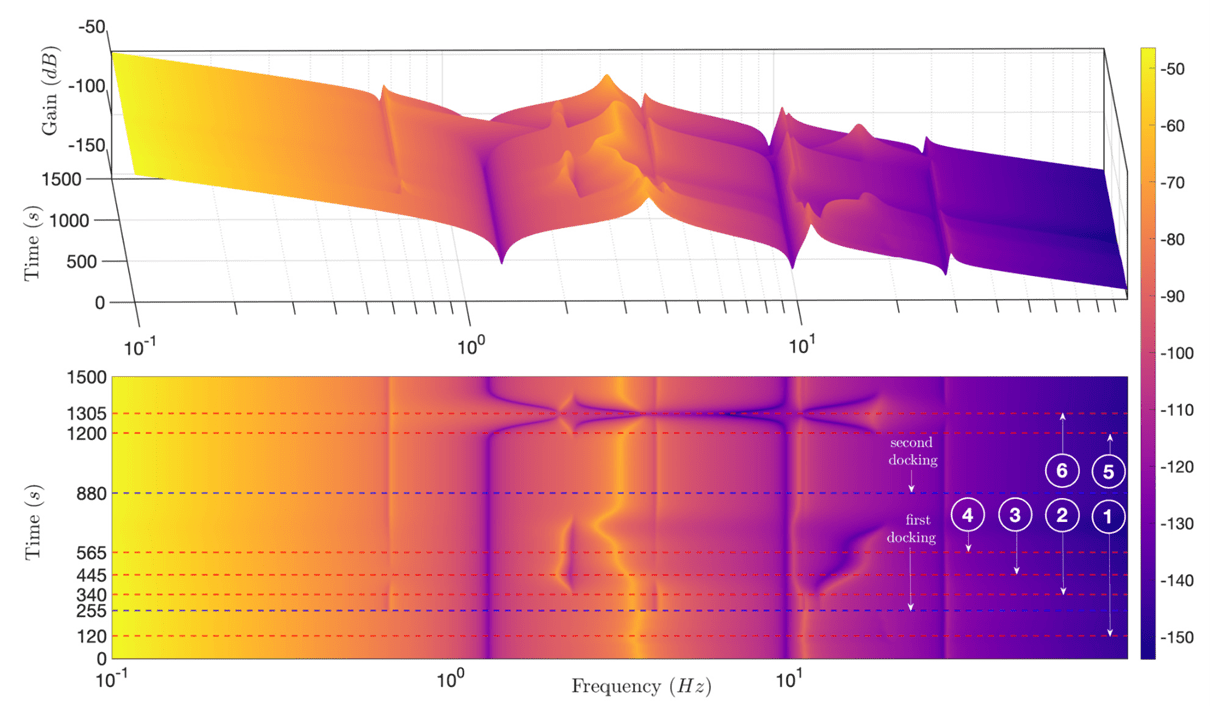
Le comportement fréquentiel peut également être analysé en fonction du temps, comme dans la figure suivante. Certaines fréquences propres varient fortement après l’amarrage et pendant la manipulation par le bras robotique (autour de 3Hz et entre 10 et 20Hz), ainsi que lors de la rotation des pannneaux solaires.
Il est important de noter que ce modèle, obtenu avec la SDTlib, est paramétrisé avec les incertitudes mais aussi les positions des liaisons du bras. C’est donc une représentation continue de toutes les configurations géométriques possibles, qui a pu être utilisé pour optimiser automatiquement, avec la robust control toolbox de Matlab, un contrôleur qui prend en compte les changements d’inertie et de modes flexibles au cours des opérations de proximité.
Rodrigues, R., Preda, V., Sanfedino, F., & Alazard, D. (2022). Modeling, robust control synthesis and worst-case analysis for an on-orbit servicing mission with large flexible spacecraft. Aerospace Science and Technology, 107865.