Cette étude de R&D, sous contrat ESA en collaboration avec Thalès Alenia Space, portait sur l’optimisation de la performance de pointage d’une mission générique d’observation. Le système a été entièrement modélisé avec la SDTlib pour effectuer une analyse fréquentielle du système et optimiser les contrôleurs.
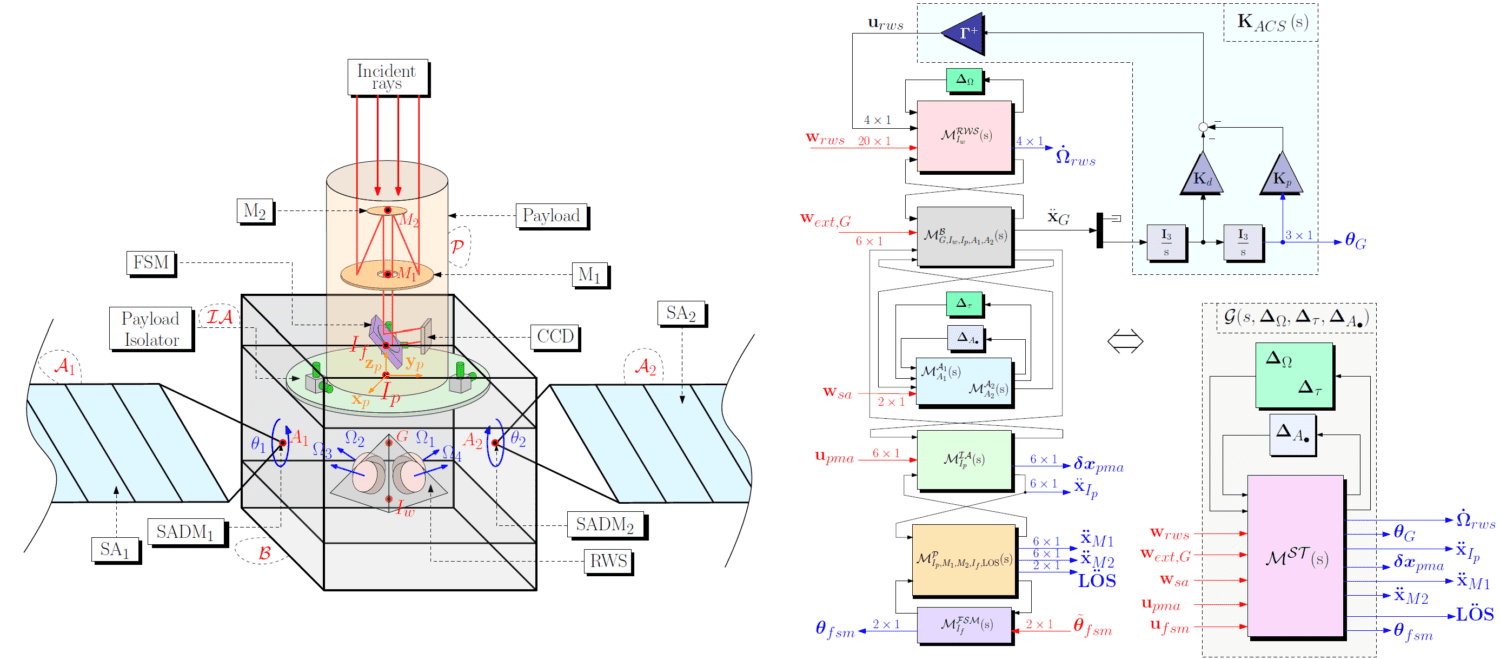
De nombreuses perturbations possibles ont été considérées :
- Eléments flexibles (panneaux solaires, corps central, et charge utile optique),
- Mécanismes des panneaux solaires (SADM) sources de microvibrations dues aux imperfections dans le réducteur,
- Roues à réaction pouvant présenter un balourd créant des perturbations harmoniques dépendant de la vitesse de rotation.
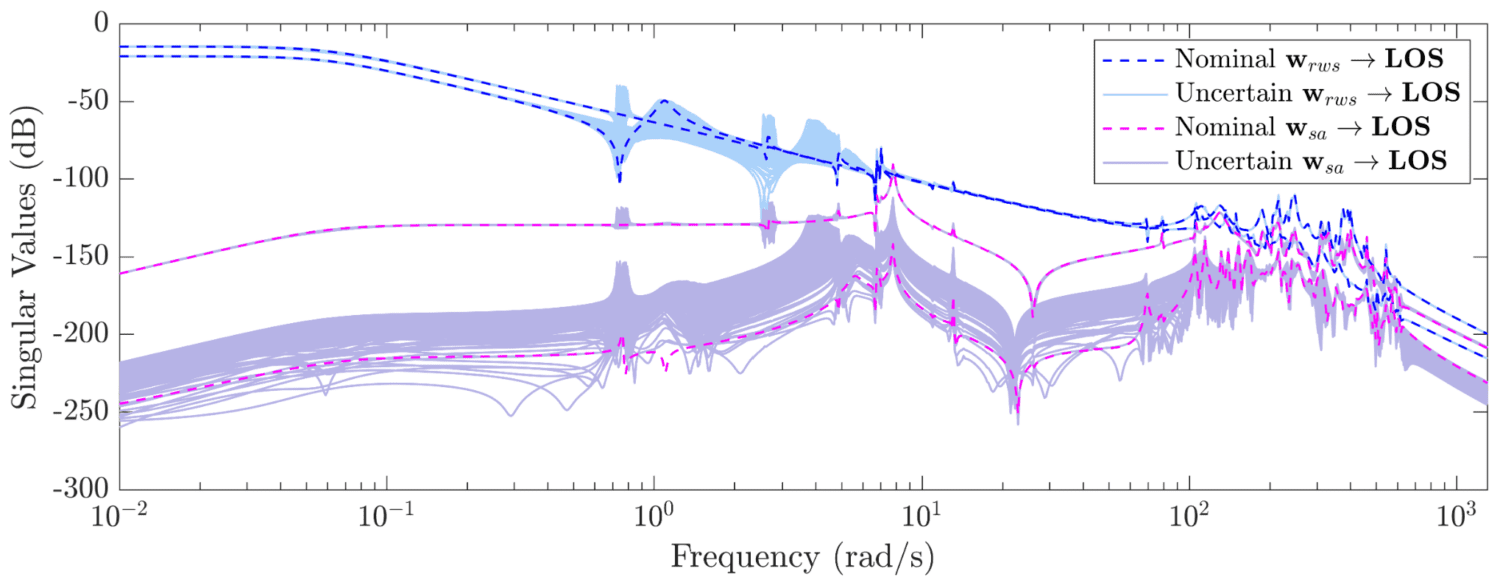
Le modèle obtenu avec la SDTlib a permis d’analyser finement le comportement fréquentiel, et en particulier la propagation des microvibrations dans le système. Ainsi, la figure suivante montre la fonction de transfert entre les perturbations (microvibrations) et l’erreur de pointage au niveau de la ligne de visée. Jusqu’à 100 rad/s, la perturbation due aux roues à réaction a un impact très supérieure à celle du SADM (et, au-dessus de 100 rad/s, elles sont comparables). En particulier, on voit l’impact des modes flexibles entre 1 et 10 rad/s, qui subissent un décalage de fréquence et d’amplitude à cause de la rotation des panneaux solaires et des vitesse possibles des roues à réaction ; lorsque la fréquence de la perturbation harmonique de la roue à réaction coïncide avec un mode structurel, la performance de pointage est dégradée. Cependant, la synthèse d’un contrôleur robuste permettra de mitiger cet effet.
Pour contrer ces perturbations, une architecture à trois étages a été étudiée :
- Contrôle d’attitude (roues à réaction, RWA),
- Isolation passive et active de la charge utile (proof-mass actuators, PMA),
- Pointage fin (fast-steering mirrors, FSM),
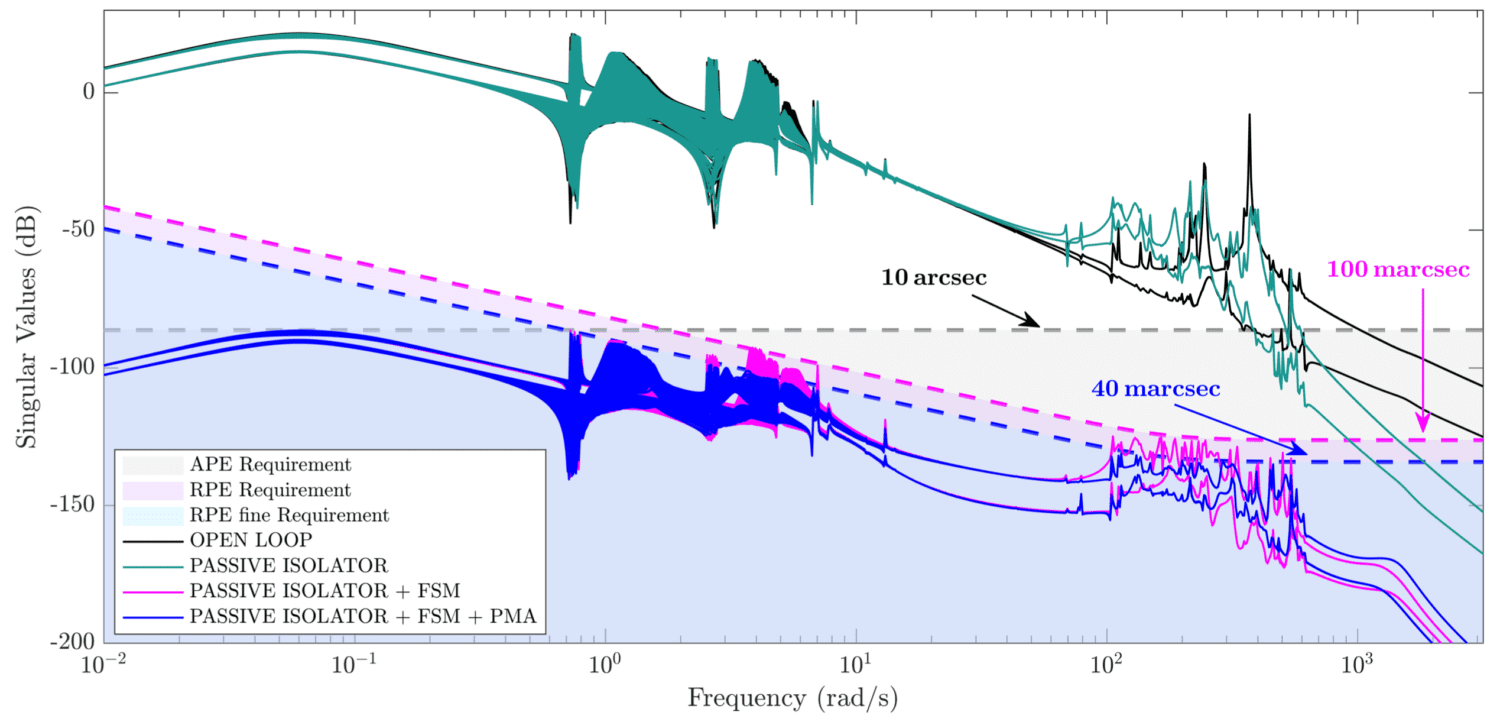
La figure suivante montre la fonction de transfert entre les perturbations (microvibrations) et l’erreur de pointage, en ajoutant progressivement les différents étages de contrôle : boucle ouverte, isolation passive, pointage fin (FSM), et isolation active (PMA). L’isolation passive permet de réduire l’erreur haute fréquence (au-delà de 200 rad/s), tout en introduisant des modes supplémentaires autour de 100 rad/s (courbe verte vs courbe noire). L’introduction du contrôle actif avec les FSMs et les PMAs permet d’améliorer encore la précision, en réduisant l’erreur haute fréquence jusqu’à 100 milli-arcsecondes puis 40 milli-arcsecondes. Ces performances sont atteintes de façon robuste aux incertitudes.
En conclusion, le modèle obtenu avec la SDTlib, et les techniques de contrôle robuste utilisées, ont permis de :
- Analyser la propagation et l’impact des diverses sources de perturbation sur la ligne de visée,
- Comparer rapidement plusieurs architectures de contrôle,
- Optimiser le contrôleur et la performance compte tenu des spécifications des actionneurs et capteurs.
Sanfedino F., Alazard D, Guercio N., Deslaef N., Double-stage active control of micro-vibrations for high accuracy pointing missions. 2023, ESA 12th International Conference on Guidance Navigation and Control and 9th International Conference on Astrodynamics Tools and Techniques, 2023-06-16 – 2023-06-12 (2023-06-12, Sopot).