Expertise en modélisation et contrôle des systèmes spatiaux
Les fondateurs de DYCSYT sont reconnus par la communauté internationale du GNC pour leur expertise dans la modélisation et le contrôle des systèmes spatiaux. En particulier, ils ont une longue expérience dans les projets collaboratifs avec l’ESA et des partnenaires industriels.
DYCSYT offre des services de conseil, tels que du support technique ou des études R&D. Nous pouvons aussi être impliqués dans des consortiums, dès l’écriture de la proposal: ESA ITT (invitation to tender), GSTP (general support technology programme), OSIP (open space innovation platform), R&T CNES, programme Horizon Europe, etc…
Modélisation et simulation
Le développement de la SDTlib a été porté par notre activité en recherche en modélisation des structures flexibles et multicorps. La SDTlib produit un modèle haute fidélité de la dynamique du système, pour l’analyse fréquentielle, le réglage de contrôleurs, et la simulation. La prise en compte des incertitudes paramétriques permet d’accélérer la conception du contrôleur et de faciliter la validation grâce au contrôle robuste. Les modèles SDTlib sont également adaptés pour réduire le temps de simulation, en particulier vis-à-vis des dynamiques flexibles.
Contrôle Robuste
Les outils de contrôle robustes modernes permettent d’évaluer les performances dès le début d’un projet et d’optimiser automatiquement le contrôleur et la performance grâce au modèle fourni par la SDTlib. Ils sont également capables de gérer les incertitudes du modèle directement dans la synthèse du contrôleur, afin d’accélèrer la conception et la validation du système GNC/AOCS, voire de débloquer des verrous techniques là où les méthodes traditionnelles échouent, dans le cas de dynamiques flexibles complexes ou d’exigences de performance élevées.
Service en orbite
Nos méthodes de modélisation et de contrôle robuste sont particulièrement utiles pour les missions de service en orbite : modélisation des mécanismes d’amarrage, prise en compte des couplages translation/rotation, variations d’inertie durant la manipulation robotique d’un satellite cible, assemblage en orbite….
Pointage de précision
Nos travaux ont été largement motivés par le développement de missions de pointage haute précision : modélisation et contrôle actif des microvibrations, rejet de perturbations, dynamiques flexibles, bilan de performance de pointage, optimisation du contrôleur, comparaison d’architectures de contrôle…
Vérification et Validation (V&V) des systèmes spatiaux
D’après la NASA, dans un projet typique de satellite, 80% du temps dédié au GNC est dédié au V&V (par opposition à la conception en elle-même), du fait de la complexité croissante des systèmes spatiaux.
En conséquence, la NASA et l’ESA ont mis en place de nombreuses initiatives au sein de la communauté GNC internationale – financement de projets R&D, séminaires GNC V&V, éducation et formation, création et diffusion de problèmes « benchmarks » – afin d’améliorer l’autonomie des systèmes de guidage, navigation et contrôle, tout en limitant la complexité du système et des différentes phases du cycle de vie.
Notre activité de recherche et de R&D, et en particulier la SDTlib, s’inscrivent en réponse à ce besoin. Une fois ces outils suffisamment matures, DYCSYT a été créée avec la volonté de contribuer à leur transfert vers la monde industriel.
Pour en savoir plus:
GNC V&V workshop en Juillet 2025
DYCSYT participe à l'organisation du GNC V&V (Verification & Validation) workshop à l'ISAE-Supaero en Juillet 2025, en collaboration avec l'ESA, la NASA, l'ONERA, le CNES, la DLR, et l'ASI. En particulier, la SDTlib sera utilisée dans une formation pratique sous Matlab-Simulink pour la modélisation, contrôle et analyse d'un système
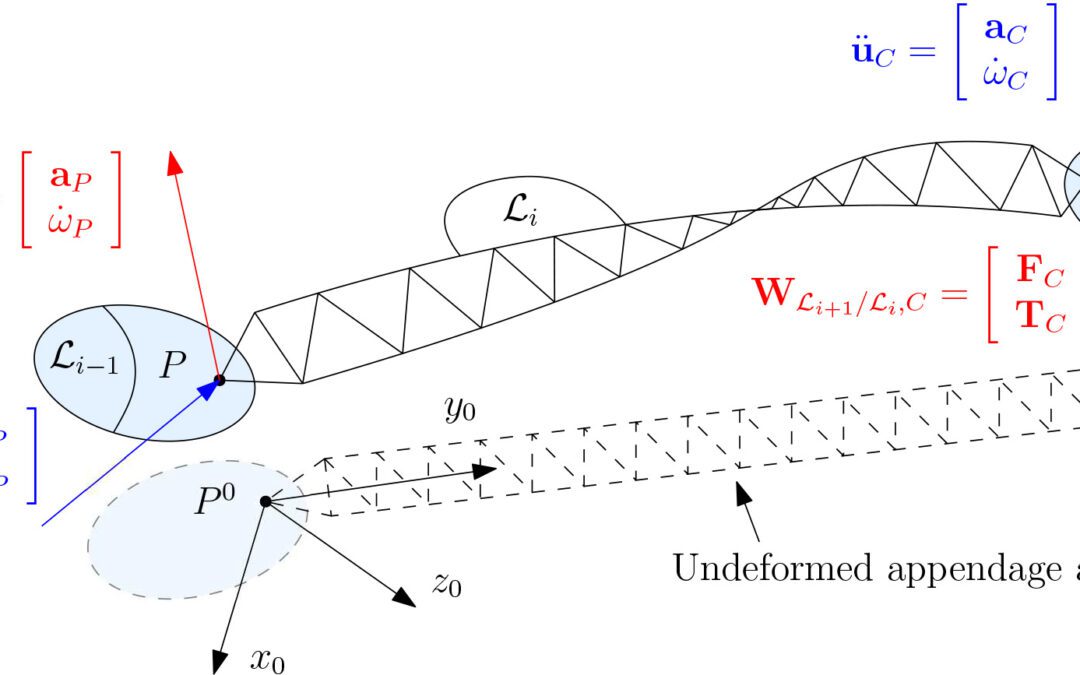
L’approche TITOP pour la modélisation multicorps des structures flexibles
Le formalisme TITOP (Two-Input Two-Output Port) permet de modéliser des structures flexibles au sein d'un formalisme multicorps, afin de construire des modèles de structures complexes. Il est compatible avec la représentation des incertitudes paramétriques.
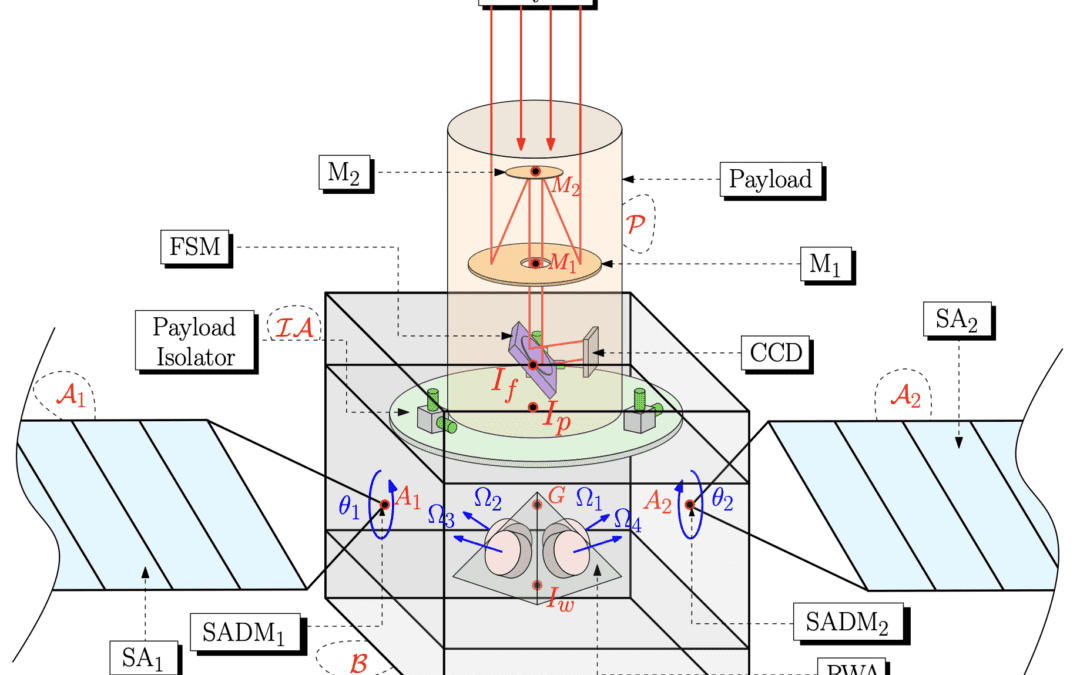
Pointage de précision pour une mission d’observation
Cette étude de R&D, sous contrat ESA en collaboration avec Thalès Alenia Space, portait sur l’optimisation de la performance de pointage d’une mission d’observation. Le système a été modélisé avec la SDTlib pour effectuer une analyse fréquentielle du système et optimiser les contrôleurs.
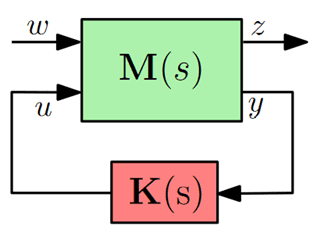
Contrôle robuste (H infini et H2)
Dans la théorie moderne du contrôle, les performances de contrôle d'un système peuvent être mesurées avec les normes $\mathcal H_\infty$ et $\mathcal H_2$. Un problème d'optimisation multi-objectifs est ensuite formulé pour régler le contrôleur de façon robuste aux incertitudes.
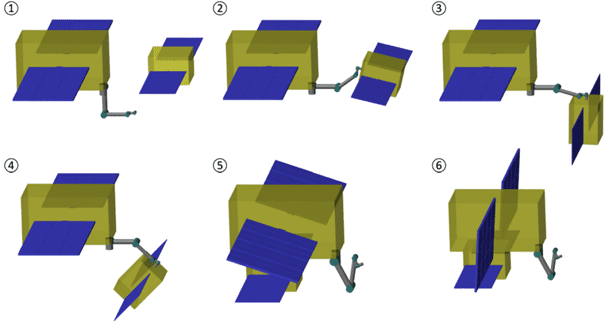
Manipulation robotique pour du service en orbite
Cette étude de R&D en collaboration avec l’ESA portait sur la modélisation haute-fidélité d’un scénario de manipulation via un bras robotique, dans le cadre d’une mission de service en orbite. Le système a été modélisé et analysé avc la SDTlib.
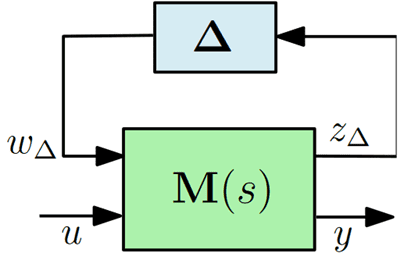
Modélisation LFT des systèmes incertains
Cet article présente comment la représentation LFT (Linear Fractional Transformation) permet de représenter des incertitudes sur les paramètres d'un système de façon continue (sans échantillonnage de l'espace paramétrique).
Etude R&D, collaboration en consortium, support technique, formation sur mesure, licence SDTlib : contactez-nous pour discuter de votre projet, nous choisirons ensemble la solution la mieux adaptée à votre besoin.